Geometric (Closed-Form)
Uses the law of cosines to compute both elbow-up and elbow-down solutions instantly. Works only for 2-DOF arms, but it is exact and has zero iteration cost. The gold standard when it applies.
このコンテンツはまだ日本語訳がありません。
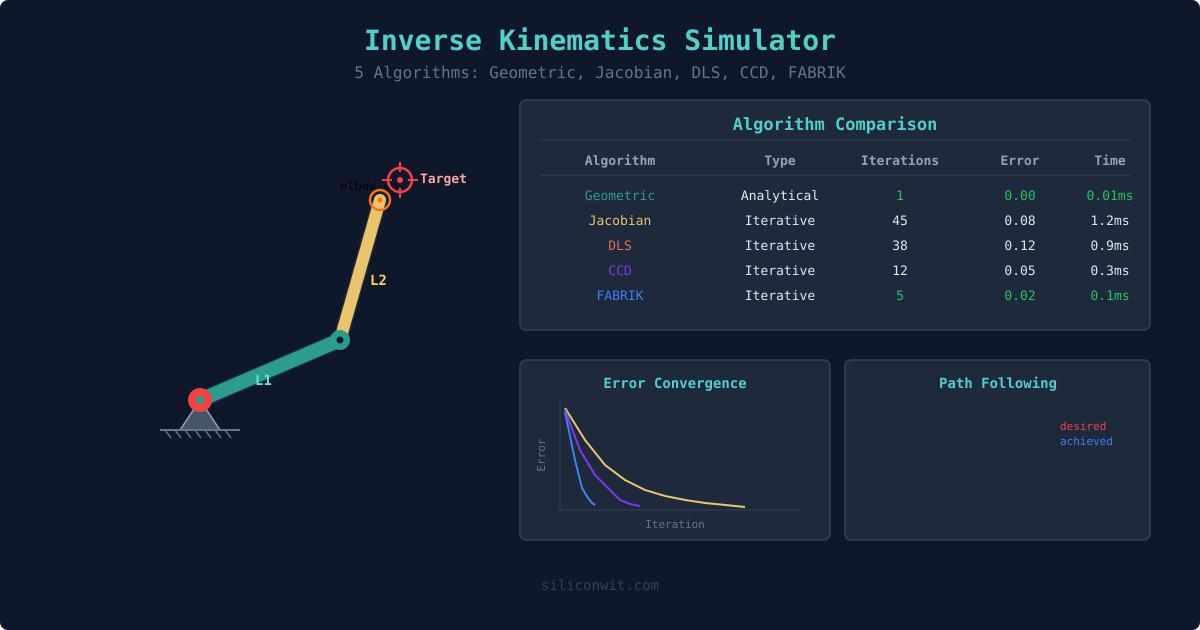
Inverse kinematics is the problem every robot must solve: given where the end-effector needs to be, what joint angles achieve that position? Unlike forward kinematics, there is no single formula that works for all cases. This simulator implements five different IK algorithms so you can see how each one converges, where it struggles, and which is best for your application. Click anywhere on the workspace to set a target and watch the arm solve in real time. #InverseKinematics #RobotAlgorithms #ConvergenceAnalysis
Open SimulatorGeometric (Closed-Form)
Uses the law of cosines to compute both elbow-up and elbow-down solutions instantly. Works only for 2-DOF arms, but it is exact and has zero iteration cost. The gold standard when it applies.
Jacobian Pseudoinverse
Iteratively updates joint angles using the Moore-Penrose pseudoinverse of the Jacobian matrix. Works for any DOF but can diverge near singularities where the Jacobian becomes rank-deficient.
Damped Least Squares
Adds a damping factor (lambda) to the Jacobian inversion, preventing divergence near singularities at the cost of some accuracy. The damping factor controls the tradeoff: more damping means more stability but slower convergence.
CCD (Cyclic Coordinate Descent)
Iterates joint by joint from end-effector to base, rotating each joint to align its chain with the target. Simple, robust, and widely used in game animation. Produces a characteristic “whipping” motion.
FABRIK
Forward And Backward Reaching Inverse Kinematics: alternates between pulling the end-effector to the target and pulling the base back to the origin. Works in position space without matrices. Fast convergence, clean paths.
| Preset | DOF | Algorithm | Target | Use Case |
|---|---|---|---|---|
| Precision Assembly | 2 | DLS | (200, 100) | Tight tolerance, stable convergence |
| Fast Pick-Place | 2 | CCD | (250, 50) | Speed over precision |
| Path Following | 2 | FABRIK | Circular path | Continuous trajectory tracking |
| Redundant Arm | 3 | DLS | (200, 80) | Extra DOF for null-space motion |
| Algorithm | Type | Convergence | Singularity Handling | Best For |
|---|---|---|---|---|
| Geometric | Analytical | Instant (1 step) | N/A (exact) | 2-DOF arms, real-time control |
| Jacobian Pseudoinverse | Iterative | Medium | Poor (diverges) | General purpose, away from singularities |
| Damped Least Squares | Iterative | Medium | Good (stable) | Near singularities, industrial control |
| CCD | Iterative | Fast | Good | Game animation, simple implementation |
| FABRIK | Iterative | Very fast | Good | Long chains, real-time applications |