Velocity tells you how fast a part moves; acceleration tells you how hard its motion is changing, and that is what creates force. A piston at 6000 rpm reverses direction a hundred times a second, and the force to turn its motion around comes straight from the engine structure, which is why a poorly balanced engine shakes itself apart. Acceleration analysis is one more differentiation of the loop you already have, and then Newton’s second law turns those accelerations into the inertia forces that size bearings and the shaking forces that engineers spend so much effort balancing. In this lesson you build acceleration polygons and convert them into dynamic forces. #AccelerationAnalysis #InertiaForces #EngineBalancing
Learning Objectives
By the end of this lesson, you will be able to:
Differentiate the velocity loop to find accelerations, splitting each into normal and tangential parts
Construct acceleration polygons for the slider-crank and four-bar
Convert accelerations into inertia and shaking forces with d’Alembert’s principle
Predict the primary and secondary shaking forces that drive engine balancing, and verify each result in a simulator
Real-World System Problem: The Forces That Shake an Engine
An engine, compressor, or pump runs steadily, yet its piston never moves at a steady speed. It accelerates hardest at the top of the stroke, where it reverses, and the force to reverse it is large: at high speed the inertia force on a piston can exceed the gas pressure force. That force is reacted through the connecting rod, the crank, the bearings, and finally the engine mounts, where it appears as vibration. Designers must predict these accelerations to size the bearings, choose the connecting-rod ratio, and add the counterweights and balance shafts that keep the machine smooth.
The Acceleration Problem
Engineering Question: Given the input speed, what is the acceleration of every part, and what inertia forces do those accelerations create?
For the slider-crank the headline result is the piston acceleration and the shaking force it produces. For the four-bar it is the angular accelerations of the coupler and follower, which set the inertia torques. For the scissor lift it is the platform acceleration that the actuator must overcome.
Why Acceleration Analysis Matters
Inertia forces
Every acceleration demands a force, . At speed these inertia forces dominate the loads on pins and bearings.
Vibration and balancing
Unbalanced inertia forces shake the machine. Predicting them is the first step to counterweights and balance shafts.
Smoothness and jerk
The rate of change of acceleration (jerk) governs how harsh a motion feels and how much a structure rings.
Actuator sizing
An actuator must supply both the static load and the inertia load. The acceleration sets the dynamic part.
Fundamental Theory: Acceleration by Differentiating the Loop
One More Derivative
Acceleration analysis differentiates the velocity loop exactly as velocity analysis differentiated the position loop. Each link’s acceleration splits into two parts:
Normal and Tangential Components
A point on a link rotating at angular velocity and angular acceleration , a distance from the pivot, has acceleration with two parts:
The normal (centripetal) part exists whenever the link rotates, even at constant speed. The tangential part exists only when the link speeds up or slows down. Their vector sum is the link’s acceleration.
The Relative-Acceleration Equation
For two points on the same rigid link,
where points from to , and is perpendicular to . This is the equation the acceleration polygon draws.
The Acceleration Polygon
Acceleration uses the same methods in the same draw, solve, simulate rhythm as position and velocity: the graphical acceleration polygon and the analytical acceleration loop are the two core routes, and the simulator confirms them. (There is no instantaneous-center shortcut for acceleration; that helper is velocity-only.)
The acceleration polygon is built with the drawing set exactly like the velocity polygon, on the same page and to a chosen acceleration scale (e.g. 1 cm = 10 mm/s²), but each relative-acceleration vector now has two parts laid down in sequence: first the normal part (known from the velocity analysis, since , directed along the link toward the centre it turns about), then the tangential part (unknown magnitude, but known direction, perpendicular to the link). Where the tangential construction lines cross closes the polygon, and you measure the unknown tangential accelerations and the output acceleration off it.
Where the Factor of 2 Comes From
Almost everyone memorises the and then cannot decide, in an unfamiliar mechanism, whether the term applies at all. It is worth six lines to see it appear, because once you have watched it arise you can always reconstruct it.
Let a point sit at distance along a link that is turning at . Put along the link and perpendicular to it. Because these directions rotate with the link:
The position is . Differentiate once, using the product rule:
Differentiate again, applying the product rule to both of those terms:
Collecting gives the four-term acceleration of a point that both slides and turns:
Situation
Coriolis present?
Piston sliding on a fixed cylinder (slider-crank)
No: the frame does not rotate
Pin joint between two rotating links (four-bar)
No: nothing slides
Scissor lift, toggle clamp
No
Block sliding in a rotating slot (quick-return shaper)
Yes
Pin sliding in a moving slot (Geneva mechanism)
Yes
From Acceleration to Force: d’Alembert
Inertia Force and d'Alembert's Principle
Newton’s second law says . d’Alembert rewrites this as a statics problem by adding an inertia force (and an inertia torque ) to each link, so that the link is treated as if in equilibrium:
The inertia force acts opposite to the acceleration, through the centre of mass. Once the accelerations are known, the dynamic bearing loads follow from a static force balance with these inertia forces included (the force analysis carries this through to the joint reactions).
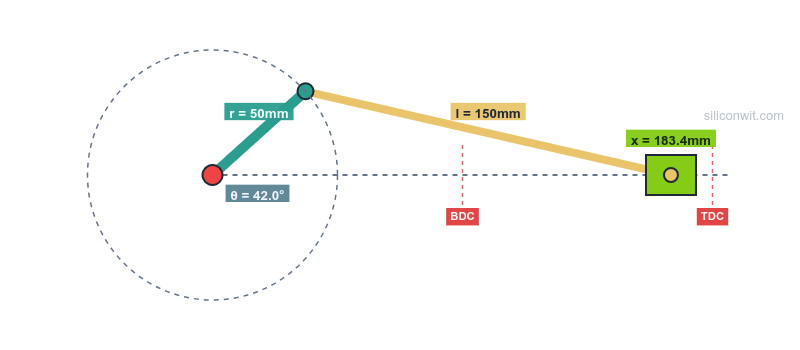
Application 1: Piston Acceleration of the Slider-Crank
This is the central worked example. We build the acceleration polygon on top of the velocity polygon, then confirm with the closed-form acceleration and the simulator.
Construct it on the velocity polygon from the velocity analysis, at the same instant .
Click to reveal the acceleration-polygon construction
Crank-pin acceleration. With the crank at constant speed, the crank pin has only a normal (centripetal) acceleration , directed from toward the centre . From the pole draw . ✅
Normal part of the rod. The connecting rod’s relative-acceleration normal part is , directed from toward , using from the velocity analysis. Add it from . It is small here because the rod turns slowly. ✅
Tangential part and closure. From the end of the normal part, draw the tangential direction (perpendicular to the rod). The piston acceleration is horizontal (the piston slides), so draw the horizontal through . Their intersection is . ✅
Measure. is the piston acceleration. At it reads about in magnitude, matching Step 2. ✅
Step 2: Confirm by Differentiation
Click to reveal the closed-form piston acceleration
Differentiate the piston velocity (constant ). The standard result, accurate to about two percent for , is:
✅
The first term is the primary acceleration (once per revolution); the second is the secondary (twice per revolution) from the connecting rod.
Tabulate for : ✅
Crank
0° (TDC)
-1.333 (peak)
30°
-1.033
60°
-0.333
90°
+0.333
120°
+0.667
180° (BDC)
+0.667
Read the peaks. The largest acceleration is at top-dead-centre, , and at bottom-dead-centre it is . The two ends differ because the secondary term adds at TDC and subtracts at BDC. At , , matching the polygon. ✅
Step 3: Verify in the Simulator
Click to reveal the simulator check
Open the simulator (siwit.co/CSM), set , , , and read the acceleration chart. ✅
Confirm the peak-to-peak split: the TDC peak is about twice the BDC peak ( versus times ), the signature of the secondary harmonic. ✅
Lengthen the rod. Increasing shrinks the secondary term, bringing the two peaks closer together and smoothing the motion. ✅
Application 2: Angular Accelerations of the Four-Bar
For the four-bar we differentiate the velocity loop once more and build the acceleration polygon to find the coupler and follower angular accelerations.
Click to reveal the acceleration-polygon construction
Crank pin. At constant crank speed, directed from to . Draw . ✅
Coupler normal. Add from , directed to . ✅
Follower normal. From the pole, the follower contributes directed to . ✅
Tangentials close it. The two tangential directions (perpendicular to coupler and to follower) intersect at . Their measured lengths give and . ✅
Step 2: Confirm by the Acceleration Loop
Click to reveal the closed-form angular accelerations
Differentiate the velocity loop (with ). The two equations are linear in and :
✅
Solve at ( rad/s):
✅
So the follower is decelerating at this instant even though it is still driving the output forward, which the simulator’s angular-acceleration trace confirms.
Step 3: Verify in the Simulator
Click to reveal the simulator check
Open the simulator (siwit.co/FBL), set the standard four-bar link lengths, and read the angular-acceleration values at . ✅
Confirm and rad/s² (per unit crank speed), matching the loop solution. ✅
Application 3: Platform Acceleration of the Scissor Lift
The scissor lift shows that a constant actuator rate does not give a constant platform motion: a centripetal-type term appears from the geometry.
Read the two terms. The first, , is the tangential part, present only when the scissor angle is speeding up. The second, , is a centripetal-type term present even at a constant angular rate (), and it always acts downward. So a lift raised at a steady angular rate still decelerates as it nears full height. ✅
Actuator consequence. The actuator must supply the platform weight plus the inertia force . Near the flat position, where the mechanical advantage is poor (force analysis), this dynamic term adds appreciably to the actuator load. ✅
The scissor closes on the single scalar relation , so its acceleration is that one line differentiated twice rather than a polygon: the scaled space diagram below is the geometric reference the two derivatives rest on.
Step 2: Verify in the Simulator
Click to reveal the simulator check
Open the simulator (siwit.co/SLM) and run it at a fixed actuator speed. ✅
Confirm that the platform acceleration is non-zero even where the angular rate is steady, and that the power trace rises where acceleration and velocity are both large. ✅
Application 4: Inertia and Shaking Forces
Acceleration becomes force through . For the slider-crank this produces the shaking force that engine balancing is designed to cancel.
Hands-on lab: Continue in the Crank-Slider Experiments lab (siwit.co/CSM). Experiment 6 (force analysis and motor sizing) builds on the inertia forces below.
Step 1: From Acceleration to Shaking Force
Click to reveal the shaking-force harmonics
Apply to the reciprocating mass using the piston acceleration from Application 1:
✅
Split into harmonics:
✅
Balancing. The primary force can be largely cancelled by a counterweight on the crank. The secondary force runs at twice engine speed and cannot be cancelled by a simple counterweight; it is why inline-four engines use balance shafts spinning at twice crank speed. The secondary is smaller by the factor , so a longer rod also reduces it. ✅
Step 2: Verify in the Simulator
Click to reveal the simulator check
Open the simulator (siwit.co/CSM) and read the force and crank-torque charts. ✅
Confirm that the force trace peaks at top-dead-centre (where acceleration peaks) and that its shape is the primary cosine plus a smaller twice-frequency ripple. ✅
Application 5: Coriolis Acceleration of the Quick-Return Shaper
The shaper of the velocity analysis is the one mechanism in this course whose acceleration is wrong if you use only normal and tangential parts. Its crank pin is a block sliding inside a turning slot, and that joint adds the Coriolis component defined in the theory above. This application is where that term earns its place.
Hands-on lab: This inversion has no simulator of its own; the drawing and the calculation confirm each other. The related pin-in-slot Coriolis effect also drives the Geneva indexing motion noted below.
Step 1: Build the Acceleration Polygon with the Coriolis Term
The block’s acceleration on the crank splits, on the lever side, into four parts laid head to tail from the pole : the lever point’s normal and tangential parts, the Coriolis part, and the slip part. Together they must close on the crank-pin acceleration.
Click to reveal the acceleration-polygon construction
Crank-pin acceleration (the target). With constant crank speed the block on the crank has only a normal acceleration mm/s², directed from toward . The construction must reproduce this vector. ✅
Normal part of the lever point. mm/s², directed from toward the fulcrum . Lay it from . ✅
Coriolis part. mm/s², directed perpendicular to the slot (the slip velocity turned in the sense of ). This is the part a plain slider-crank never has. ✅
Close with the two unknown directions. The lever’s tangential part is perpendicular to the lever (unknown magnitude); the slip acceleration is parallel to the slot (unknown magnitude). Drawing those two directions to close the polygon onto fixes both. Measuring gives the tangential part mm/s² and the slip acceleration mm/s². ✅
Lever angular acceleration. rad/s². ✅
Step 2: Ram Acceleration and Analytical Check
Click to reveal the ram acceleration and confirmation
Ram-drive acceleration. The driving point on the lever has a normal part (toward ) and a tangential part (perpendicular to the lever):
✅
The Coriolis term is not optional. At mm/s² it is a large share of the closing polygon; drop it and the tangential part, and hence and the ram acceleration, come out wrong. Any mechanism with a block sliding in a moving slot (this shaper, a Whitworth drive, a Geneva index) must carry it. ✅
Analytical confirmation. Writing the loop and differentiating twice, with the block distance as a changing length, produces the same four terms: the second derivative of is the slip acceleration, and the cross term is exactly the Coriolis part. The numbers match the polygon. ✅
A Note on Intermittent-Motion Mechanisms
Design Guidelines for Acceleration and Dynamic Forces
Differentiate, don't restart
The acceleration loop is the differentiated velocity loop. Reuse the positions and velocities; only the tangential accelerations are new unknowns.
Size for the peak
Inertia loads peak where acceleration peaks (top-dead-centre for the slider-crank). Size pins, rods, and bearings for that worst case.
Mind the second harmonic
The secondary term scales with and runs at twice speed. A longer connecting rod or a balance shaft tames it.
Constant rate is not constant motion
Centripetal and normal terms create acceleration even at steady input speed. Never assume a smoothly driven machine is inertia-free.
Summary and Next Steps
Key Concepts Mastered
Acceleration loop: one more derivative of the velocity loop, with normal () and tangential () components.
Acceleration polygon: the normal parts are known from the velocity analysis; the tangential parts close the polygon.
Piston acceleration:, peaking at top-dead-centre at .
Inertia and shaking forces: turns accelerations into the loads that vibrate machines, split into a primary and a balance-shaft-requiring secondary harmonic.
Every acceleration here was drawn as a polygon, confirmed by hand calculation, and reproduced with a few lines of Python (NumPy). The simulators confirm the same profiles. No specialised dynamics software is needed; the method is one derivative beyond velocity.
Next, Cam-Follower Systems and Motion Programming inverts the problem: instead of analysing a given linkage, you specify the motion you want (its displacement, velocity, acceleration, and jerk) and design the cam surface that produces it.




Comments