Holding a workpiece during machining or welding requires a clamp that locks firmly, resists vibration, and releases with one hand. A screw clamp is secure but slow; a spring clamp is fast but weak. A toggle clamp achieves both: the over-center linkage multiplies a small hand force into a large clamping force, then locks mechanically so no continuous effort is needed. In this lesson you will design a toggle clamp in FreeCAD with parametric over-center geometry and self-locking behavior. #FreeCAD #ToggleClamp #OverCenter #SelfLocking
Learning Objectives
By the end of this lesson, you will be able to:
Design mechanisms with angle-based constraints and over-center geometry
Create clearance-aware parametric parts with motion limits
Implement mechanical advantage through intelligent linkage design
Control locked and unlocked states via geometric relationships
Toggle clamps are essential fixturing devices that use over-center geometry to create high clamping forces with low input force and provide self-locking behavior. They’re ubiquitous in manufacturing, woodworking, and assembly operations, converting small handle motion into powerful, locked clamping force.
Real-World Applications
The toggle clamp appears everywhere in manufacturing:
The Engineering Problem
Design Challenge: Given the need to secure a workpiece quickly and reliably, how do we create high clamping force with low operator effort that locks in place without continuous force application?
FreeCAD organizes tools into workbenches - specialized tool collections for different tasks.
Key Workbenches for This Lesson:
Part Design - Creating individual parametric parts
Sketcher - Creating 2D constraint-based sketches
Spreadsheet - Parameter tables and calculations
Assembly - Combining parts with motion constraints
TechDraw - Creating engineering drawings
Part 2: Parametric Design Strategy
A parametric toggle clamp is designed with intelligent relationships between link lengths, angles, and positions. This allows you to explore different mechanical advantage ratios and motion characteristics by changing just a few parameters: the hallmark of professional engineering design.
Ensure edges align or merge with main arm rectangle
Optional: Round the pad edge
Creates better contact surface
Use fillet or arc
This wider pad:
Distributes clamping force
Provides clear contact point
Prevents workpiece damage
Check and complete:
Verify fully constrained
Check solver messages
Close sketch
Click Close button
Pad the clamp arm:
Pad tool
Length: ƒx → Spreadsheet.LinkThickness
OK
Clamp arm complete!
All four parts are now ready for assembly!
Part 8: Assembly
Assembly is where your individual parts come together as a functioning over-center mechanism. FreeCAD’s Assembly workbench uses constraints to define how parts relate to each other, allowing you to test the locking behavior and verify your design achieves the critical over-center geometry.
Assembly Strategy
🎯 Assembly Constraints Plan
Base: Fixed (ground link)
Handle: Rotates about base pivot at origin
Main Link: Connects handle to clamp arm (two pivots)
Clamp Arm: Pivots on base, receives force from main link
Test: Verify over-center locking in closed position
The main link now transmits motion between handle and clamp arm!
Mount clamp arm to base:
ClampArm pivot hole axis → Base second pivot hole axis
Axial Align constraint
Test the over-center action:
Open position: Drag handle to open (~45° up)
Main link and clamp arm should form acute angle (~150°)
Mechanism moves easily
Closed position: Drag handle down (~-20°)
Main link and clamp arm should be past 180° (~185°)
Should feel “locked” - resistant to opening
Part 10: Technical Drawing
Creating Functional Drawing
1. Switch to TechDraw
2. Create Page
Insert Page → A3_Landscape
3. Add Assembly Views
Two views showing both positions:
View 1: Open position (before center)
View 2: Closed position (over-center)
4. Dimension Critical Angles
Add angle dimensions showing:
Handle angle in each position
Main link to clamp arm angle in each position
Highlight the over-center angle (>180°)
5. Add Functional Notes
Note: “Over-center angle ensures self-locking”
Note: “Handle force amplified 10:1 at clamp” (calculate actual MA)
6. Export
Export as PDF
Part 11: Testing Parametric Control
Change Handle Length
Open Spreadsheet
Change HandleLength from 120 to 150
Recompute
Longer handle = greater mechanical advantage!
Change Over-Center Angle
Try OverCenterAngle = 175° (barely over-center)
Weaker locking
Try 190° (far over-center)
Stronger locking but harder to close
Verify Motion Limits
The mechanism should have clear end stops:
Fully open: Handle hits stop
Fully closed: Over-center locked
Learning Outcomes
By completing this lesson, you have:
✅ Designed an over-center mechanism
✅ Applied angle-based constraints
✅ Created clearance-aware geometry
✅ Implemented mechanical advantage through linkage design
✅ Designed for locked and unlocked states
✅ Created functional dimension-focused drawings
✅ Understood how geometry creates locking behavior
Design Verification
Does the handle move smoothly from open to closed?
Is there a noticeable resistance when passing through center?
Does the closed position self-lock (resist opening)?
When you change HandleLength, does MA change appropriately?
Are all pivot holes aligned without binding?
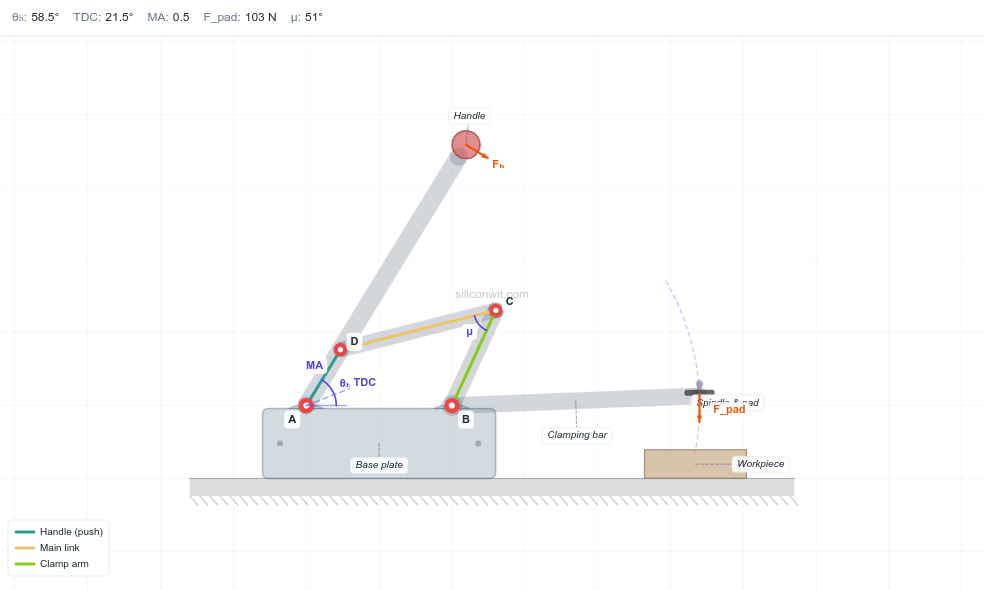
Calculating Mechanical Advantage
Mechanical Advantage (MA) = Output Force / Input Force
For a toggle clamp:
Where θ is the angle between main link and clamp arm.
As θ approaches 90°, MA maximizes.
As θ approaches 180° (dead center), MA approaches infinity.
Challenges for Further Practice
Add adjustable clamping force - threaded adjustment screw
Design a hold-down clamp variant (vertical clamp arm)
Add a release lever for quick-release
Create a spring return mechanism
Design mounting holes for T-slot table mounting
Add rubber clamping pads (different material)
Common Issues and Solutions
“Mechanism doesn’t lock”
Cause: Not achieving over-center (angle < 180°)
Solution: Increase OverCenterAngle parameter
Fix: Adjust pivot positions to allow greater angle
“Too hard to close”
Cause: Over-center angle too large, or friction
Solution: Reduce OverCenterAngle closer to 180°
Fix: Check pin clearances
“Handle hits clamp arm”
Cause: Insufficient clearance
Solution: Offset handle vertically (different Z position) or adjust geometry
Fix: Use clearance-aware design, check interference in assembly
“Cannot achieve full motion range”
Cause: Link lengths incompatible with desired positions
Solution: Recalculate link lengths using kinematic equations
Fix: Adjust MainLinkLength or ClampArmLength
Next Steps
Simulate it: Use the Toggle Clamp Mechanism Simulator to analyze the force amplification, lock margin, and pin/link stresses of the clamp you just built, and adjust the geometry in real time.
Run the experiments: Work through the Toggle Clamp Experiments for structured, Python-verified exercises.
Read more: See the 2D Mechanisms Analyzer for the full simulator set and downloadable resources.
In the next lesson on Pantograph Mechanism, we’ll explore:
Comments