Angular Positions
Coupler and follower angle profiles across 360 degrees of input crank rotation. See how link proportions control the output motion pattern.
The four-bar linkage is the simplest closed-loop mechanism and the building block for most complex machine motion: windshield wipers, excavator booms, aircraft landing gear, and robotic arms all reduce to four-bar chains. This simulator provides complete kinematic analysis with Grashof condition checking, coupler curve tracing, and angular velocity profiles. #FourBarLinkage #MechanismSimulator #KinematicAnalysis
Open SimulatorAngular Positions
Coupler and follower angle profiles across 360 degrees of input crank rotation. See how link proportions control the output motion pattern.
Angular Velocities
Coupler and follower angular velocity profiles. Understand velocity ratios and how they vary through the cycle, critical for timing and speed control.
Transmission Angle
Monitor the angle that determines force transmission quality. When it drops below 40 degrees, the mechanism jams under load. The simulator shows exactly where this happens.
Grashof Condition
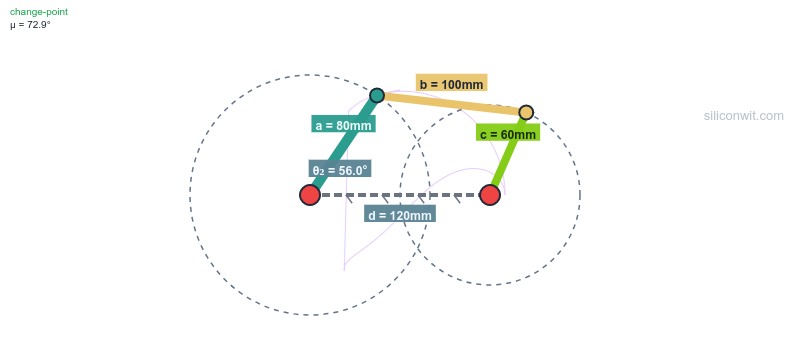
Automatic classification: crank-rocker, double-crank, double-rocker, or change-point. Instantly see whether the input link can make a full rotation.
Real-Time Animation with Coupler Curve Watch the mechanism move with angle arcs (theta and mu) visible on the diagram. The coupler midpoint traces its characteristic curve. Toggle paths, adjust rotation direction, and export as PNG or animation video.
Eight Analysis Plots Coupler angle, follower angle, coupler angular velocity, follower angular velocity, transmission angle, mechanical advantage, joint B velocity, and coupler curve (X-Y path). All with A/B comparison overlay.
Five Engineering Presets Crank-rocker, double-crank, double-rocker, triple-rocker (non-Grashof), and parallelogram. Each demonstrates a different Grashof classification with pre-verified parameters.
Ground Offset Shift the output pivot vertically from -50 to +50mm. This changes the effective ground length and can flip the Grashof classification, a feature not available in other online simulators.
Open and Crossed Circuits Switch between the two possible assembly configurations to see how the same link lengths produce completely different motion.
Professional Downloads Export CSV data (361 points, 14 variables), PNG charts, animation video (.webm), design specifications with Freudenstein constants and kinematic analysis, lab reports, and FreeCAD Python scripts. Two separate CSVs when A/B comparison experiments are run.
| Preset | Crank (a) | Coupler (b) | Follower (c) | Ground (d) | Speed | Grashof |
|---|---|---|---|---|---|---|
| Crank-Rocker | 40 mm | 120 mm | 80 mm | 100 mm | 60 RPM | Yes (a shortest) |
| Double-Crank | 60 mm | 80 mm | 70 mm | 40 mm | 30 RPM | Yes (d shortest) |
| Double-Rocker | 80 mm | 35 mm | 60 mm | 100 mm | 30 RPM | Yes (b shortest) |
| Triple-Rocker | 70 mm | 90 mm | 60 mm | 110 mm | 45 RPM | No |
| Parallelogram | 60 mm | 100 mm | 60 mm | 100 mm | 60 RPM | Yes (a=c, b=d) |
Position analysis uses the Freudenstein equation and half-angle substitution:
K1*cos(theta4) - K2*cos(theta2) + K3 = cos(theta2 - theta4)
K1 = d/a, K2 = d/c, K3 = (a^2 - b^2 + c^2 + d^2) / (2*a*c)Velocity analysis from the velocity loop:
omega3 = a*omega2*sin(theta4 - theta2) / (b*sin(theta3 - theta4))omega4 = a*omega2*sin(theta2 - theta3) / (c*sin(theta4 - theta3))Where a = input crank, b = coupler, c = follower, d = ground, and omega2 = input angular velocity.
Nine structured experiments are available in the Mechanism Design and Simulation course, each with Python analysis scripts and design questions:
Comments