import matplotlib.pyplot as plt
from sklearn.linear_model import LinearRegression
x = np.random.uniform(0, 10, n)
y = 3 * x + 7 + np.random.randn(n) * 2
# ── Gradient Descent Implementation ──
def gradient_descent(x, y, lr=0.01, epochs=500):
losses, ws, bs = [], [], []
for epoch in range(epochs):
loss = np.mean((y - y_pred) ** 2)
dw = -2 * np.mean(x * (y - y_pred))
db = -2 * np.mean(y - y_pred)
return w, b, losses, ws, bs
# ── Run gradient descent ──
w_gd, b_gd, losses, ws, bs = gradient_descent(x, y, lr=0.01, epochs=500)
# ── Compare with scikit-learn (closed-form solution) ──
lr_model = LinearRegression()
lr_model.fit(x.reshape(-1, 1), y)
w_sklearn = lr_model.coef_[0]
b_sklearn = lr_model.intercept_
print("GRADIENT DESCENT vs CLOSED-FORM SOLUTION")
print(f"\n{'Method':<25} {'w (slope)':<12} {'b (intercept)':<14} {'MSE':<10}")
print(f"{'True values':<25} {'3.000':<12} {'7.000':<14}")
print(f"{'Gradient descent':<25} {w_gd:<12.4f} {b_gd:<14.4f} {losses[-1]:<10.4f}")
y_sk_pred = lr_model.predict(x.reshape(-1, 1))
mse_sk = np.mean((y - y_sk_pred) ** 2)
print(f"{'scikit-learn (exact)':<25} {w_sklearn:<12.4f} {b_sklearn:<14.4f} {mse_sk:<10.4f}")
print(f"\nDifference in parameters:")
print(f" |w_gd - w_exact| = {abs(w_gd - w_sklearn):.6f}")
print(f" |b_gd - b_exact| = {abs(b_gd - b_sklearn):.6f}")
print(f"\nGradient descent converges to the same answer as the exact solution.")
# ── Full visualization ──
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
axes[0, 0].plot(losses, color='steelblue', linewidth=2)
axes[0, 0].set_xlabel('Epoch')
axes[0, 0].set_ylabel('MSE Loss')
axes[0, 0].set_title('Loss Curve (log scale)')
axes[0, 0].set_yscale('log')
axes[0, 0].grid(True, alpha=0.3)
# Plot 2: Parameter convergence
axes[0, 1].plot(ws, label=f'w (final: {w_gd:.3f})', color='steelblue', linewidth=2)
axes[0, 1].plot(bs, label=f'b (final: {b_gd:.3f})', color='tomato', linewidth=2)
axes[0, 1].axhline(y=w_sklearn, color='steelblue', linestyle='--', alpha=0.4, label=f'w exact: {w_sklearn:.3f}')
axes[0, 1].axhline(y=b_sklearn, color='tomato', linestyle='--', alpha=0.4, label=f'b exact: {b_sklearn:.3f}')
axes[0, 1].set_xlabel('Epoch')
axes[0, 1].set_ylabel('Parameter Value')
axes[0, 1].set_title('Parameters Converge to Exact Solution')
axes[0, 1].legend(fontsize=8)
axes[0, 1].grid(True, alpha=0.3)
x_line = np.linspace(0, 10, 100)
axes[1, 0].scatter(x, y, alpha=0.4, s=15, color='gray')
axes[1, 0].plot(x_line, w_gd * x_line + b_gd, color='steelblue', linewidth=2,
label=f'GD: y = {w_gd:.2f}x + {b_gd:.2f}')
axes[1, 0].plot(x_line, w_sklearn * x_line + b_sklearn, color='tomato', linewidth=2,
linestyle='--', label=f'Exact: y = {w_sklearn:.2f}x + {b_sklearn:.2f}')
axes[1, 0].set_xlabel('x')
axes[1, 0].set_ylabel('y')
axes[1, 0].set_title('GD vs Exact Solution (they overlap)')
axes[1, 0].grid(True, alpha=0.3)
# Plot 4: Loss landscape contour with GD path
w_range = np.linspace(0, 6, 100)
b_range = np.linspace(0, 14, 100)
W, B = np.meshgrid(w_range, b_range)
for i in range(W.shape[0]):
for j in range(W.shape[1]):
y_pred = W[i, j] * x + B[i, j]
Z[i, j] = np.mean((y - y_pred) ** 2)
axes[1, 1].contour(W, B, Z, levels=30, cmap='viridis', alpha=0.6)
axes[1, 1].plot(ws, bs, 'r.-', markersize=1, linewidth=1, alpha=0.7, label='GD path')
axes[1, 1].plot(ws[0], bs[0], 'go', markersize=8, label='Start')
axes[1, 1].plot(ws[-1], bs[-1], 'r*', markersize=12, label='End')
axes[1, 1].plot(w_sklearn, b_sklearn, 'kx', markersize=10, markeredgewidth=2, label='Exact minimum')
axes[1, 1].set_xlabel('w (weight)')
axes[1, 1].set_ylabel('b (bias)')
axes[1, 1].set_title('Loss Landscape with GD Path')
axes[1, 1].legend(fontsize=8)
axes[1, 1].grid(True, alpha=0.3)
plt.savefig('gradient_descent_complete.png', dpi=100)
print("\nPlot saved as gradient_descent_complete.png")
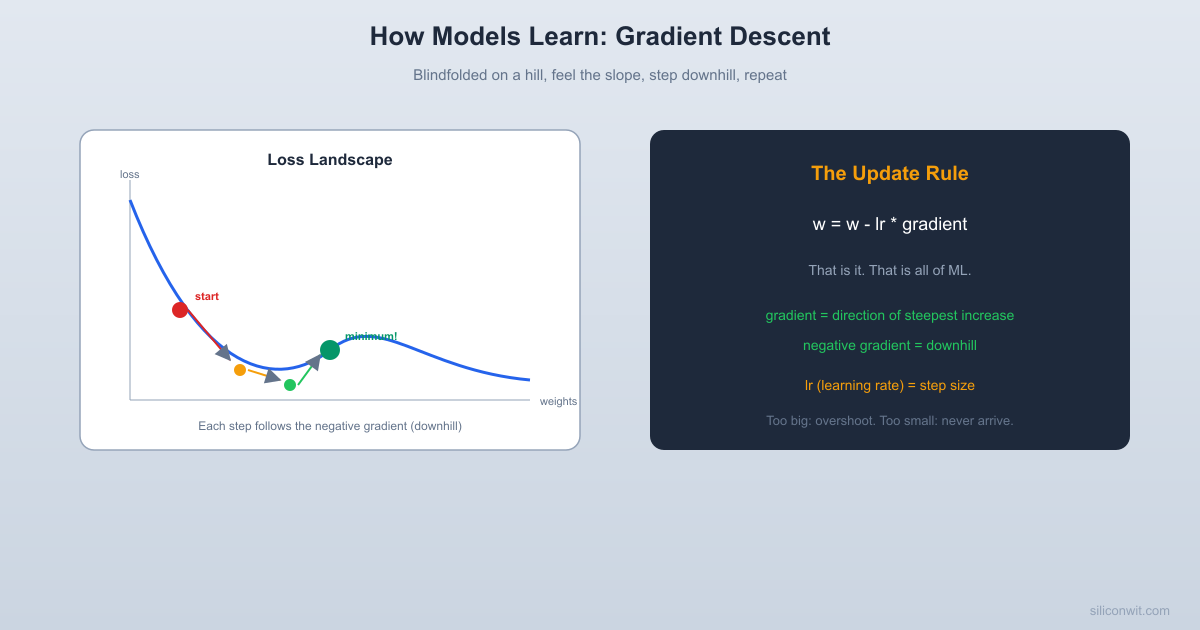
print("\nBottom-right: the contour plot shows the loss landscape.")
print("The GD path (red) starts at a random point and follows the")
print("gradient downhill to the minimum (black X).")
Comments