RC Circuit
Differential Equations and Real Systems
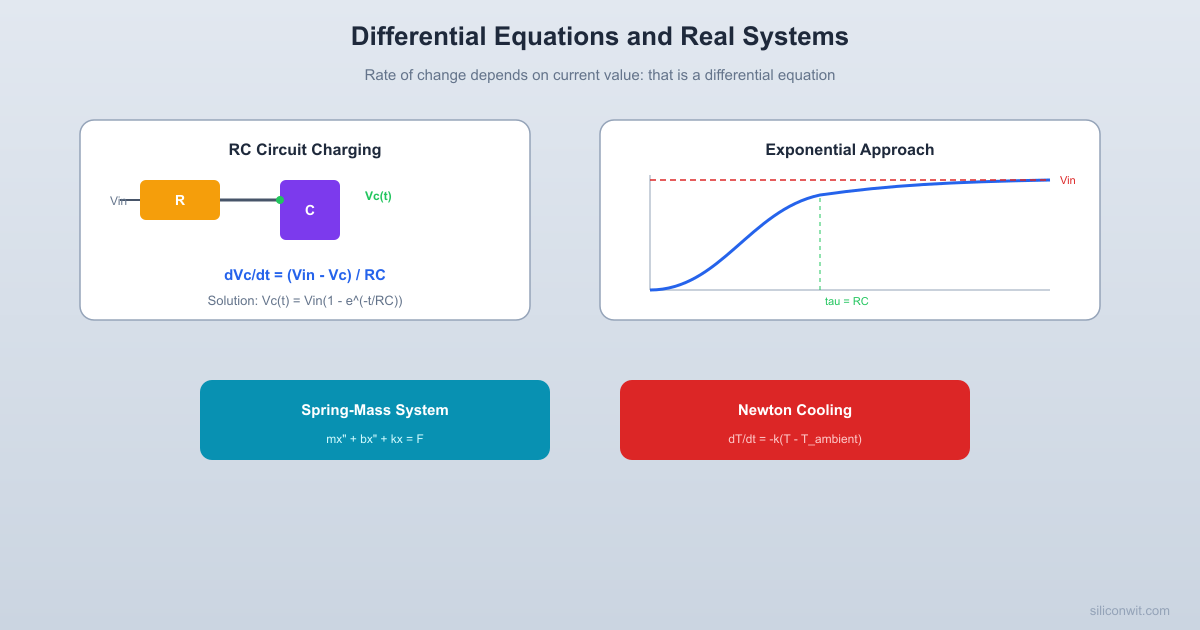
A differential equation is a statement about rates. “The rate at which this capacitor charges depends on how much charge it already has.” “The rate at which this spring oscillates depends on how far it has been stretched.” “The rate at which your coffee cools depends on how much hotter it is than the room.” These are not abstract mathematical constructs. They are descriptions of how the physical world actually works. #DifferentialEquations #Engineering #Modeling
The Core Idea
An ordinary differential equation (ODE) relates a function to its own derivatives. The simplest useful form:
This says: the rate of change of
That is the entire concept. Everything else is technique.
First-Order: One Rate, One Variable
A first-order ODE involves only the first derivative. These describe systems with one energy storage element: a capacitor charging, a tank draining, a body cooling.
Second-Order: Oscillation Becomes Possible
A second-order ODE involves the second derivative. These describe systems with two energy storage mechanisms: a spring that stores potential energy and a mass that stores kinetic energy, or an LC circuit where energy bounces between the inductor and capacitor. Second-order systems can oscillate. First-order systems cannot.
The RC Circuit: A First-Order System
The most important first-order ODE in electronics. A resistor
R Vin --/\/\/\--+-- Vout | = C | GND -----------+Kirchhoff’s voltage law gives:
The current through the capacitor is
Rearranging:
This is the standard first-order ODE. The rate of change of
The Solution
If
After one time constant (
Why This Matters Everywhere
The RC equation is not just about capacitors. Any system where the rate of approach to equilibrium is proportional to the distance from equilibrium follows this same equation. A thermocouple responding to a temperature change. A sensor settling to a new value. A tank filling through a pipe. The math is identical; only the physical variables change.
Thermal System
Fluid Tank
Newton’s Law of Cooling: Your Coffee Cup
Newton observed that a hot object cools at a rate proportional to the temperature difference between the object and its surroundings:
This is the same structure as the RC circuit. The solution is the same shape:
The constant
The interest on your savings account follows this same exponential equation, just growing instead of decaying. Compound interest is
import numpy as npimport matplotlib.pyplot as plt
# Compare cooling in different containersT_ambient = 22 # room temperature (C)T_0 = 90 # initial coffee temperature (C)t = np.linspace(0, 120, 500) # 2 hours
# Different cooling constants (1/min)containers = { 'Open cup': 0.04, 'Ceramic mug': 0.025, 'Travel mug': 0.008, 'Vacuum flask': 0.002}
plt.figure(figsize=(8, 5))for name, k in containers.items(): T = T_ambient + (T_0 - T_ambient) * np.exp(-k * t) plt.plot(t, T, linewidth=2, label=f'{name} (k={k})')
plt.axhline(y=60, color='gray', linestyle=':', alpha=0.5, label='Drinkable (~60 C)')plt.xlabel('Time (minutes)')plt.ylabel('Temperature (C)')plt.title("Newton's Law of Cooling")plt.legend()plt.grid(True, alpha=0.3)plt.tight_layout()plt.show()The Spring-Mass System: A Second-Order ODE
Attach a mass
where
Wall | |/\/\/\/\/\---[ M ]-----> x | spring k mass m | |~~~~~~~~~~~~~ damper b (friction)Your car’s suspension is exactly this system. The spring supports the car’s weight, the shock absorber provides damping, and the car body is the mass. Too little damping (worn shocks) means a bouncy ride. Too much damping means a harsh ride that transmits every bump. The manufacturer tunes the suspension to be slightly underdamped for a comfortable balance of smoothness and responsiveness.
This is the second-order ODE that governs vibration in mechanical systems, oscillation in electrical circuits, and resonance in acoustic systems. The three terms represent:
: inertia (mass resists acceleration) : damping (friction opposes velocity) : restoring force (spring pulls back toward equilibrium)
Natural Frequency and Damping Ratio
The two key parameters are:
The natural frequency
When
where
When
When
Python: Damping Regimes
import numpy as npimport matplotlib.pyplot as plt
# Spring-mass parametersomega_n = 2 * np.pi # natural frequency (rad/s), about 1 Hzt = np.linspace(0, 5, 1000)
# Different damping ratiosdamping_cases = { 'Underdamped (zeta=0.1)': 0.1, 'Underdamped (zeta=0.3)': 0.3, 'Critically damped (zeta=1.0)': 1.0, 'Overdamped (zeta=2.0)': 2.0,}
plt.figure(figsize=(10, 6))for label, zeta in damping_cases.items(): if zeta < 1: omega_d = omega_n * np.sqrt(1 - zeta**2) x = np.exp(-zeta * omega_n * t) * np.cos(omega_d * t) elif zeta == 1: x = (1 + omega_n * t) * np.exp(-omega_n * t) else: r1 = -omega_n * (zeta + np.sqrt(zeta**2 - 1)) r2 = -omega_n * (zeta - np.sqrt(zeta**2 - 1)) # Initial conditions: x(0)=1, v(0)=0 c2 = (r1) / (r1 - r2) c1 = 1 - c2 x = c1 * np.exp(r1 * t) + c2 * np.exp(r2 * t) plt.plot(t, x, linewidth=2, label=label)
plt.axhline(y=0, color='k', linewidth=0.5)plt.xlabel('Time (s)')plt.ylabel('Displacement')plt.title('Spring-Mass System: Damping Regimes')plt.legend()plt.grid(True, alpha=0.3)plt.tight_layout()plt.show()Solving ODEs Numerically: Euler’s Method
Most differential equations have no closed-form solution. The RC circuit and spring-mass system are special because their solutions can be written as exponentials and sines. In practice, you solve ODEs numerically.
The simplest numerical method is Euler’s method. The idea is direct:
-
You know
at time -
The ODE tells you
at that point -
Step forward a small amount:
-
Repeat from the new point
That is it. You are walking along the solution curve by following the tangent line for a small step, then recalculating the slope.
Euler’s Method for the RC Circuit
import numpy as npimport matplotlib.pyplot as plt
# RC circuit parametersR = 10e3 # 10 kohmC = 100e-6 # 100 uFtau = R * C # time constant = 1 secondV_in = 5.0 # 5V step input
# Euler's methoddt = 0.01 # time step (seconds)t_end = 5.0 # simulate 5 secondsN = int(t_end / dt)
t = np.zeros(N)V = np.zeros(N)V[0] = 0 # capacitor starts discharged
for i in range(N - 1): dVdt = (V_in - V[i]) / tau V[i+1] = V[i] + dVdt * dt t[i+1] = t[i] + dt
# Exact solution for comparisont_exact = np.linspace(0, t_end, 500)V_exact = V_in * (1 - np.exp(-t_exact / tau))
plt.figure(figsize=(8, 5))plt.plot(t_exact, V_exact, 'b-', linewidth=2, label='Exact solution')plt.plot(t[::10], V[::10], 'ro', markersize=4, label=f'Euler (dt={dt}s)')plt.xlabel('Time (s)')plt.ylabel('Capacitor Voltage (V)')plt.title('RC Circuit: Euler Method vs Exact Solution')plt.legend()plt.grid(True, alpha=0.3)plt.tight_layout()plt.show()
print(f"Time constant: {tau:.3f} s")print(f"At t=tau: exact={V_in*(1-np.exp(-1)):.3f}V, " f"Euler={V[int(tau/dt)]:.3f}V")Converting Second-Order to First-Order
Euler’s method handles first-order ODEs directly. To solve the spring-mass system (second-order), convert it into two first-order equations:
Let
Now you have two coupled first-order ODEs, which Euler’s method can handle by updating both
Euler’s Method for the Spring-Mass System
import numpy as npimport matplotlib.pyplot as plt
# Spring-mass parametersm = 1.0 # mass (kg)k = 10.0 # spring constant (N/m)b = 0.5 # damping coefficient (N*s/m)F = 0.0 # no external force
omega_n = np.sqrt(k / m)zeta = b / (2 * np.sqrt(k * m))print(f"Natural frequency: {omega_n:.2f} rad/s ({omega_n/(2*np.pi):.2f} Hz)")print(f"Damping ratio: {zeta:.3f}")
# Euler's methoddt = 0.005t_end = 10.0N = int(t_end / dt)
t = np.zeros(N)x = np.zeros(N)v = np.zeros(N)
# Initial conditions: pulled 1 meter and releasedx[0] = 1.0v[0] = 0.0
for i in range(N - 1): ax = (F - b * v[i] - k * x[i]) / m # acceleration x[i+1] = x[i] + v[i] * dt v[i+1] = v[i] + ax * dt t[i+1] = t[i] + dt
plt.figure(figsize=(10, 5))plt.plot(t, x, 'b-', linewidth=1.5)plt.xlabel('Time (s)')plt.ylabel('Position (m)')plt.title(f'Spring-Mass System (zeta={zeta:.2f}, f_n={omega_n/(2*np.pi):.2f} Hz)')plt.grid(True, alpha=0.3)plt.tight_layout()plt.show()When Euler’s Method Fails
Euler’s method is simple but not always reliable. Two common problems:
Instability. If the time step
Drift. Euler’s method accumulates error over time. For the spring-mass system, it slowly adds energy: the oscillation amplitude grows instead of staying constant or decaying. Better methods like the Runge-Kutta method (covered in the Numerical Methods lesson) fix this.
import numpy as npimport matplotlib.pyplot as plt
# Show Euler instability with large time steptau = 1.0V_in = 5.0
fig, axes = plt.subplots(1, 3, figsize=(12, 4))dt_values = [0.1, 0.5, 2.5]
for ax, dt in zip(axes, dt_values): N = int(5.0 / dt) + 1 t = np.zeros(N) V = np.zeros(N) for i in range(N - 1): V[i+1] = V[i] + (V_in - V[i]) / tau * dt t[i+1] = t[i] + dt
t_exact = np.linspace(0, 5, 200) V_exact = V_in * (1 - np.exp(-t_exact / tau))
ax.plot(t_exact, V_exact, 'b-', linewidth=2, label='Exact') ax.plot(t, V, 'ro-', markersize=4, label=f'Euler') ax.set_title(f'dt = {dt}s (dt/tau = {dt/tau})') ax.set_xlabel('Time (s)') ax.set_ylim(-2, 10) ax.legend(fontsize=8) ax.grid(True, alpha=0.3)
axes[0].set_ylabel('Voltage (V)')plt.suptitle('Euler Method: Effect of Time Step Size', fontsize=12)plt.tight_layout()plt.show()From ODEs to System Modeling
Differential equations are the bridge between physical laws and predictions. The process:
-
Identify the physical laws governing the system (Newton’s law, Kirchhoff’s law, conservation of energy)
-
Write the governing equation as an ODE
-
Identify the parameters (
, , , , ) -
Solve analytically if possible, numerically if not
-
Validate by comparing predictions to measured data
This is exactly the workflow used in the Modeling and Simulation course, where these techniques are applied to mechanical, electrical, and thermal systems in detail.
Exercises
-
RC time constant. An RC circuit has
and . What is the time constant? If and the capacitor starts discharged, how long until reaches 3.0 V? -
Cooling experiment. Measure the temperature of a cup of hot water every minute for 30 minutes. Fit Newton’s cooling law to your data to find
. How well does the exponential model match? -
Step size sensitivity. Solve the RC circuit with Euler’s method using
, , , , and . Plot all solutions on the same graph. At what step size does the error become unacceptable? At what step size does the solution become unstable? -
Damped oscillator. Use Euler’s method to simulate a spring-mass system with
, , and three different damping values: , , . What is in each case? How do the time histories differ? -
Coupled systems. Two RC circuits in series (the output of the first feeds the input of the second). Write the system of two coupled first-order ODEs and solve numerically. How does the response differ from a single RC circuit?
References
- Strogatz, S. H. (2015). Nonlinear Dynamics and Chaos. Westview Press. Chapter 2 is an excellent introduction to first-order ODEs.
- Zill, D. G. (2017). A First Course in Differential Equations with Modeling Applications. Cengage.
- 3Blue1Brown. Differential Equations. youtube.com/playlist?list=PLZHQObOWTQDNPOjrT6KVlfJuKtYTftqH6
Comments