Quaternions provide a compact, singularity-free representation of 3D orientation that is essential for smooth robotic motion. This lesson builds from Euler angle limitations through quaternion algebra to practical SLERP interpolation, applied to drone gimbal stabilization and surgical tool positioning. #robotics #quaternions #orientation-control
Learning Objectives
By the end of this lesson, you will be able to:
Identify gimbal lock in Euler angle representations and explain why it causes loss of control
Construct unit quaternions from axis-angle representations and compose rotations via quaternion multiplication
Implement SLERP interpolation for smooth orientation transitions in robotic systems
Apply quaternion operations to rotate vectors and compose sequential 3D rotations without singularities
Compare Euler angles, rotation matrices, and quaternions for different robotic applications
Real-World Engineering Challenge: Drone Gimbal Stabilization and Surgical Tool Orientation
Camera drones must maintain a stable, level camera view regardless of the vehicle body tilting during aggressive maneuvers. Surgical robots must smoothly reorient their end-effector tools between arbitrary orientations without sudden jumps or loss of controllable degrees of freedom. Both problems demand an orientation representation that handles arbitrary 3D rotations continuously and predictably, something Euler angles fundamentally cannot guarantee.
Representative Systems
Orientation-Critical Robotic Applications:
Camera Gimbals (drones, handheld stabilizers): maintaining level horizon during rapid platform motion
Spacecraft Attitude Control (reaction wheels, CMGs): pointing solar panels and antennas accurately
Industrial Robot Welding: maintaining torch angle along curved seam paths
Humanoid Robot Heads: smooth gaze tracking without jerky eye or neck motion
Underwater ROVs: stable sensor orientation despite current disturbances
The Orientation Control Challenge
These systems require precise, continuous control of:
Engineering Question: How do we represent and interpolate 3D orientations so that a drone gimbal or surgical tool can smoothly transition between any two orientations without losing a degree of freedom?
Why Not Just Use Euler Angles Everywhere?
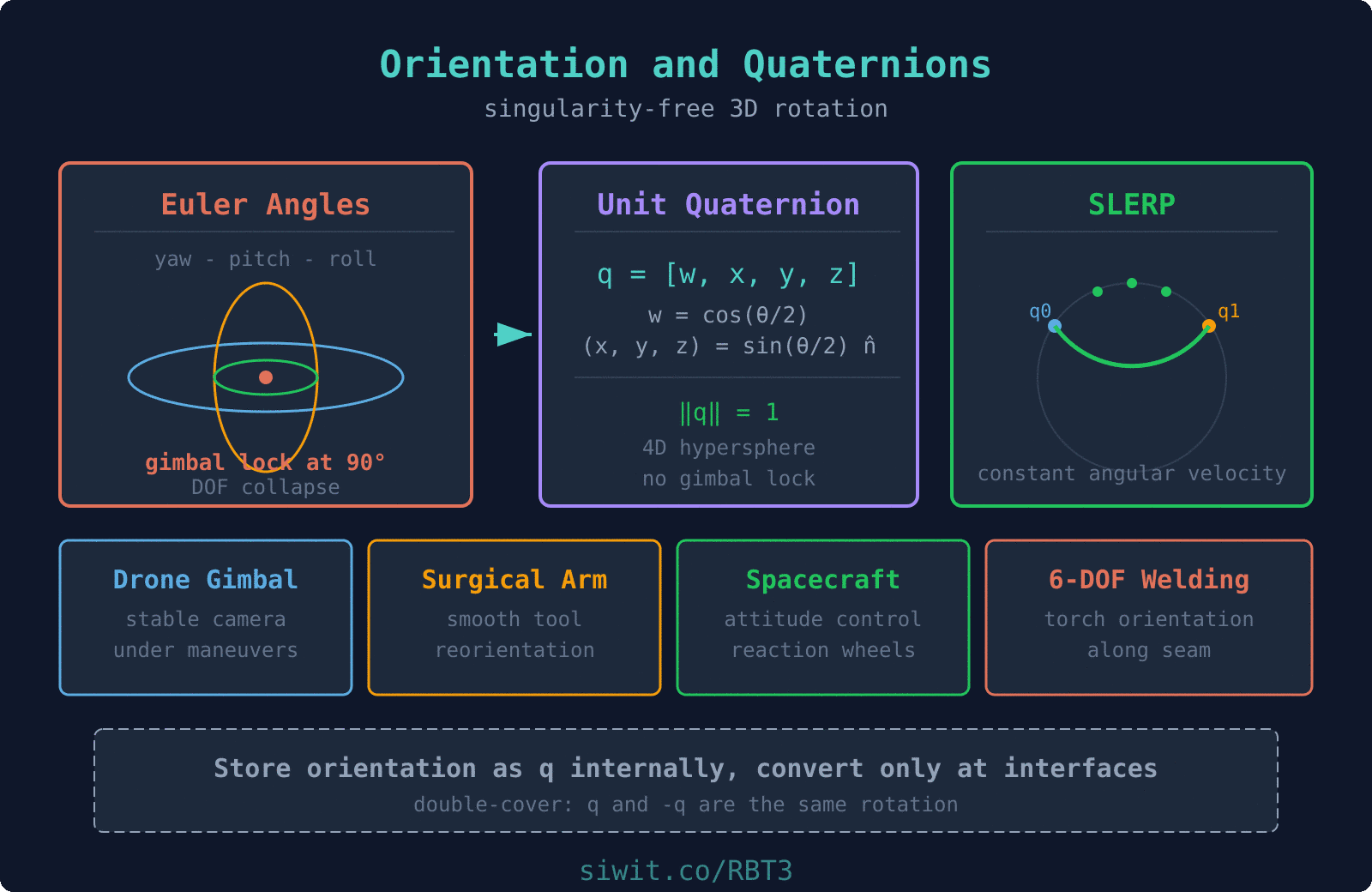
Euler angles (roll, pitch, yaw) are intuitive for small rotations and human communication. However, they suffer from gimbal lock: a configuration where two rotation axes align and the system loses one degree of freedom. For a drone gimbal pitched to exactly 90 degrees, roll and yaw become indistinguishable, making smooth control impossible at that configuration. Quaternions solve this problem completely.
Consequences of Poor Orientation Representation
What Goes Wrong Without Quaternions:
Gimbal lock causes sudden loss of control authority at specific orientations
Euler angle interpolation produces curved, non-intuitive paths through orientation space
Rotation matrix accumulation drifts from orthogonality due to floating-point errors
Discontinuous motion when switching between Euler angle branches
Computational overhead from re-orthogonalizing 3x3 matrices every control cycle
Fundamental Theory: Quaternion-Based Orientation
Euler Angles Review: Roll, Pitch, Yaw
Euler angles describe a 3D orientation as three sequential rotations about specified axes. For the full derivation of rotation matrices and how they compose, see 3D Rotation Matrices and Spatial Transformations. The most common convention in robotics and aerospace is the ZYX (yaw-pitch-roll) sequence: first rotate about the Z-axis by yaw angle , then about the new Y-axis by pitch angle , then about the newest X-axis by roll angle .
The combined rotation matrix for ZYX Euler angles is:
Expanding each matrix:
The Gimbal Lock Problem
Gimbal Lock: Three Nested Rings
Normal Operation (pitch != 90) Gimbal Lock (pitch = 90)
+--- yaw ring ---+ +--- yaw ring ---+
| | | |
| +- pitch ring + | | +- pitch ring + |
| | | | | | | | |
| | +- roll -+ | | | | +- roll -+ | |
| | | camera | | | | | | camera | | |
| | +--------+ | | | | +--------+ | |
| +-------------+ | | +------+------+ |
+-----------------+ +--------+--------+
|
3 independent axes yaw and roll axes
= 3 DOF now PARALLEL = 2 DOF
(1 DOF lost)
Gimbal lock occurs when the middle rotation in an Euler angle sequence reaches , causing the first and third rotation axes to align. At this configuration, the three-parameter representation effectively collapses to two parameters, and one degree of rotational freedom becomes uncontrollable.
Physical Explanation:
Consider a drone gimbal with three nested rings (yaw, pitch, roll). When the pitch axis rotates to exactly , the yaw ring and roll ring become parallel. Rotating either one produces the same motion. The system has “lost” the ability to independently control all three orientation components.
Mathematically, when in the ZYX convention:
Using trigonometric identities:
Notice that only the difference appears. We can change and independently, but the rotation matrix only depends on their difference. One degree of freedom has been lost.
# Demonstrating gimbal lock with Euler angles
import numpy as np
from scipy.spatial.transform import Rotation
# Normal case: pitch = 45 degrees (no gimbal lock)
print(f"\n R1 (yaw=40, pitch=90, roll=30) vs R2 (yaw=50, pitch=90, roll=40):")
print(f" Same rotation? {np.allclose(r1.as_matrix(), r2.as_matrix())}")
print(f" (Both have yaw-roll = 10°, producing identical orientations)")
Quaternion Definition
A quaternion is a four-dimensional number system that extends complex numbers. A general quaternion has one real (scalar) part and three imaginary (vector) parts:
where , , are the fundamental quaternion units satisfying:
The multiplication rules follow from these identities:
Unit Quaternions and the Rotation Constraint
For representing rotations, we restrict ourselves to unit quaternions, which lie on the surface of the 4D unit hypersphere. A unit quaternion satisfies the constraint:
This constraint means that 3D rotations live on a 3-dimensional surface () embedded in 4D space. The unit quaternion group is a double cover of the rotation group SO(3): both and represent the same physical rotation.
Quaternion from Axis-Angle Representation
Axis-Angle to Quaternion Mapping
Axis-Angle: Quaternion:
n_hat (unit axis) q = [w, x, y, z]
| / | |
| / theta | |
|/ (rotation | +-- sin(theta/2) * n_hat
+--- angle) |
origin +-- cos(theta/2)
Example: 90 deg about Z-axis
n_hat = (0, 0, 1), theta = 90 deg
w = cos(45) = 0.707
x = sin(45) * 0 = 0
y = sin(45) * 0 = 0 q = [0.707, 0, 0, 0.707]
z = sin(45) * 1 = 0.707
Any 3D rotation can be described as a rotation by angle about a unit axis . The corresponding unit quaternion is:
print(f"\nReversed order quaternion: {r_reversed.as_quat().round(4)}")
print(f"Same as combined? {np.allclose(r_combined.as_quat(), r_reversed.as_quat())}")
Quaternion Conjugate and Inverse
The quaternion conjugate negates the vector part while keeping the scalar part unchanged. For unit quaternions, the conjugate equals the inverse, representing the reverse rotation.
Conjugate:
Inverse (general):
For unit quaternions ():
This means (the identity quaternion).
Rotating Vectors with Quaternions
To rotate a 3D vector by a unit quaternion , embed the vector as a pure quaternion and compute:
The result is a pure quaternion whose vector part gives the rotated vector.
import numpy as np
from scipy.spatial.transform import Rotation
# Rotate vector [1, 0, 0] by 90° about Z-axis
# Expected result: [0, 1, 0]
r = Rotation.from_euler('z',90,degrees=True)
v_original = np.array([1, 0, 0])
v_rotated = r.apply(v_original)
print(f"Original vector: {v_original}")
print(f"Rotation: 90° about Z")
print(f"Rotated vector: {v_rotated.round(4)}")
# Multiple vectors at once
vectors = np.array([
[1, 0, 0],
[0, 1, 0],
[0, 0, 1],
[1, 1, 0]
])
rotated = r.apply(vectors)
print(f"\nBatch rotation results:")
for v, rv inzip(vectors, rotated):
print(f" {v} -> {rv.round(4)}")
SLERP: Spherical Linear Interpolation
SLERP (Spherical Linear Interpolation) produces the shortest, constant-angular-velocity path between two orientations on the quaternion hypersphere. Unlike linear interpolation of Euler angles (which creates curved, non-uniform paths), SLERP guarantees smooth, predictable rotational motion.
Given two unit quaternions and , and an interpolation parameter :
where is the angle between the two quaternions.
Double-Cover in Practice: Always Check the Dot Product
The double-cover property ( and represent the same rotation) is the single most common quaternion bug in practice. Interpolating between and with SLERP produces a full rotation instead of staying still, because SLERP goes the long way around the hypersphere. scipy.spatial.transform.Slerp handles this internally, but if you implement SLERP yourself, you must guard against it:
defslerp_safe(q0, q1, t):
# q0, q1 are np.array([x, y, z, w]), already unit quaternions
dot = np.dot(q0, q1)
if dot <0.0: # Take the shorter arc.
q1 =-q1
dot =-dot
if dot >0.9995: # Nearly identical: linear interpolation.
result = q0 + t * (q1 - q0)
return result / np.linalg.norm(result)
omega = np.arccos(dot)
s0 = np.sin((1- t) * omega) / np.sin(omega)
s1 = np.sin(t * omega) / np.sin(omega)
return s0 * q0 + s1 * q1
The same pattern applies to quaternion-based trajectory tracking: at every tick, check and negate the target if negative. Without this, the robot can “unwind” a full rotation between two otherwise close orientations.
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial.transform import Rotation, Slerp
print("Euler interpolation has variable speed and may produce unexpected paths")
System Application: Quaternion-Based Gimbal Stabilization
We now apply quaternion theory to the drone gimbal stabilization problem. The gimbal must smoothly track a target orientation while the drone body rotates underneath it. Using quaternions, we compute the required gimbal correction at each time step and generate smooth command trajectories via SLERP.
Problem Setup
A camera drone is performing an aerial survey. The drone body undergoes roll and pitch disturbances from wind gusts, but the camera must maintain a fixed downward-pointing orientation. The gimbal control loop runs at 100 Hz and must compute the corrective rotation quaternion at each step.
Given:
Camera desired orientation: pointing straight down, (90° about X-axis from level)
Drone body orientation (measured by IMU): varying quaternion
Gimbal must output: such that
Solution:
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial.transform import Rotation, Slerp
print(f"Ideal correction (instant): max error = {camera_error.max():.4f}°")
print(f"Rate-limited (SLERP): max error = {camera_error_smooth.max():.2f}°")
print(f"Rate-limited (SLERP): mean error = {camera_error_smooth.mean():.2f}°")
Extending to Surgical Robot Tool Orientation
The same quaternion framework applies to surgical tool positioning. A surgical robot must smoothly reorient its tool between two arbitrary poses (e.g., from a viewing angle to a cutting angle). The key differences from the gimbal case:
Waypoint sequences: SLERP between multiple orientations using chained interpolation
Velocity constraints: the tool must not exceed safe angular speeds near tissue
Obstacle avoidance: orientation must be coordinated with position to avoid collisions with anatomy
The mathematics is identical. The gimbal correction formula applies in both cases. The surgical system adds trajectory constraints on top of the basic quaternion operations.
Selecting the right orientation representation depends on your system requirements. Here are practical guidelines derived from industrial and research robotics practice.
Use quaternions when your system must interpolate between orientations smoothly, operate near or through all possible orientations, or run in real-time control loops at high frequency. Drones, IMU fusion, spacecraft attitude control, and animation systems all benefit from quaternions.
Use rotation matrices when working within a homogeneous transformation pipeline (e.g., DH parameters in serial robot arms), when composing rotation with translation, or when interfacing with legacy systems that expect 3x3 or 4x4 matrices.
Use Euler angles only for human-facing interfaces (joystick input, display readouts), small-angle approximations in linearized control, or quick prototyping where gimbal lock is not a concern. Always convert to quaternions or matrices for internal computation.
Store orientations as quaternions internally, converting to other representations only at the interface layer. This prevents numerical drift and ensures singularity-free operation throughout the control pipeline.
Normalize quaternions regularly to prevent drift from the unit hypersphere. is computationally cheap. Concrete cadence: renormalize every control cycle in a high-frequency loop (100 Hz or faster), or whenever . After a few hundred repeated multiplications without normalization, a unit quaternion can drift by several percent, and the resulting rotation becomes non-orthogonal.
Check the sign convention when combining quaternion libraries. Since and represent the same rotation, always enforce (or check dot product sign before SLERP) to avoid taking the long path around the hypersphere.
Summary
This lesson covered the complete quaternion framework for robotic orientation control. Starting from the limitations of Euler angles (gimbal lock at specific configurations), we developed quaternion algebra as a singularity-free alternative. Unit quaternions represent rotations as points on a 4D hypersphere, enabling smooth SLERP interpolation that maintains constant angular velocity. Through the drone gimbal stabilization example, we demonstrated how quaternion operations (composition, inversion, vector rotation) translate directly to practical control code. The comparison between Euler angles, rotation matrices, and quaternions provides a decision framework for selecting the right representation based on your system’s requirements.
Key Takeaways:
Euler angles suffer from gimbal lock when the middle rotation reaches , losing one degree of freedom
Unit quaternions with represent rotations without singularities
Quaternion multiplication composes rotations; the conjugate gives the inverse rotation
SLERP interpolation produces the shortest, smoothest path between two orientations
For real-time robotic control, store orientations as quaternions internally and convert only at interface boundaries
Comments