This is the lesson where embedded Rust stops looking like C with extra syntax and starts showing its true advantage. Embassy is an async runtime designed from the ground up for microcontrollers. It replaces a traditional RTOS by turning every async fn into a compiler-generated state machine that shares a single stack. No heap allocator, no per-task stack allocation, no priority inversion bugs. You write code that reads like sequential logic, yet the executor interleaves your tasks cooperatively whenever one of them awaits a timer, a peripheral, or a channel message. By the end of this lesson you will have three tasks running concurrently on a Raspberry Pi Pico: an LED blinker, a button monitor, and a serial reporter, all sharing the same 264 KB of RAM that a FreeRTOS equivalent would struggle to fit two tasks into. #Embassy #AsyncEmbedded #RP2040
What We Are Building
Multi-Task Async System
Three concurrent Embassy tasks on a single Pico board. Task 1 blinks an external LED at a configurable rate. Task 2 monitors a push button with debounce logic and toggles the blink pattern. Task 3 reports system state (button press count, current pattern, uptime) over USB serial every 2 seconds. All tasks communicate through Embassy channels and signals, with zero heap allocation.
3 concurrent (blinker, button monitor, serial reporter)
Communication
Channel for button events, Signal for pattern change
LED Output
GP15 (external LED through 220 ohm resistor)
Button Input
GP14 (active-low with internal pull-up)
Serial Output
USB CDC at 115200 baud
Heap Allocation
None (no alloc crate)
Bill of Materials
Ref
Component
Quantity
Notes
1
Raspberry Pi Pico
1
RP2040-based board
2
LED (any color)
1
Standard 3mm or 5mm
3
220 ohm resistor
1
Current limiting for LED
4
Push button
1
Momentary, normally open
5
Breadboard + jumper wires
1 set
6
USB Micro-B cable
1
For programming and serial
Wiring Table
Pico Pin
GPIO
Connection
Notes
Pin 20
GP15
LED anode (through 220 ohm to GND)
Blink output
Pin 19
GP14
Button (other leg to GND)
Active-low input
Pin 38
GND
LED cathode, button GND
Common ground
USB
---
Computer USB port
Programming and serial
Why Embassy, Not an RTOS
Every traditional RTOS (FreeRTOS, Zephyr, RIOT) follows the same model: each task gets its own stack, a scheduler preempts tasks based on priority, and the kernel manages task control blocks on the heap. This model works, but it costs real RAM on small microcontrollers.
On an RP2040 with 264 KB of SRAM, a FreeRTOS configuration typically allocates:
Resource
FreeRTOS
Embassy
Per-task stack
512 to 2048 bytes each
0 (shared main stack)
Task control block
~92 bytes each
~0 (compile-time state machine)
Kernel heap
4096+ bytes (configurable)
0 (no heap)
Timer structures
Heap-allocated linked list
Static, compile-time
Total for 3 tasks
~8 to 10 KB minimum
~1.2 KB total
Embassy achieves this by leveraging Rust’s async/await at the language level. When you write an async fn, the Rust compiler transforms it into a state machine enum. Each state captures only the local variables that are live across an .await point, not the entire call stack. The executor polls these state machines on a single thread, using hardware interrupts from timer peripherals to wake tasks at the right moment.
The Key Differences
No Preemption
Embassy tasks cooperate. A task runs until it hits an .await, then yields. If a task never awaits, it starves all others. This is simpler to reason about (no data races from preemption), but you must structure code to await regularly.
No Per-Task Stacks
In FreeRTOS, you must guess each task’s maximum stack depth and pad it for safety. Guess too low, you get stack overflow. Guess too high, you waste RAM. Embassy eliminates this entirely because the compiler calculates the exact state machine size at build time.
Compile-Time Guarantees
The Rust type system ensures you cannot forget to .await a future, cannot share mutable state between tasks without synchronization, and cannot access a peripheral from two tasks simultaneously. These are compile errors, not runtime bugs.
Zero Heap
Embassy never calls malloc. All task state, channels, signals, and timer structures are statically allocated. This means no fragmentation, no out-of-memory panics at runtime, and deterministic memory usage visible at link time.
Setting Up an Embassy Project
Before writing code, you need the correct project structure and dependencies. Embassy is a collection of crates, each handling a specific concern.
Project Structure
Directoryembassy-multitask/
Directory.cargo/
config.toml
Directorysrc/
main.rs
Cargo.toml
build.rs
memory.x
rust-toolchain.toml
Cargo.toml
The dependency list is longer than a bare-metal project because Embassy splits functionality across focused crates. Each crate does one thing.
Cargo.toml
[package]
name = "embassy-multitask"
version = "0.1.0"
edition = "2021"
[dependencies]
# Embassy core: the async executor
embassy-executor = { version = "0.7", features = ["arch-cortex-m", "executor-thread"] }
# Embassy RP2040 HAL: peripheral drivers for the RP2040
embassy-rp = { version = "0.3", features = ["time-driver", "rp2040"] }
# Embassy time: Timer::after, Duration, Instant
embassy-time = { version = "0.4", features = ["generic-queue-8"] }
# Embassy sync: channels, signals, mutexes
embassy-sync = "0.6"
# Embassy USB: USB device support
embassy-usb = "0.4"
# USB CDC ACM class (serial port)
embassy-usb-logger = "0.4"
# Cortex-M runtime
cortex-m = { version = "0.7", features = ["inline-asm"] }
cortex-m-rt = "0.7"
# Panic handler: print panic messages over defmt or halt
panic-halt = "1.0"
# Logging (optional, for debug output)
defmt = "0.3"
defmt-rtt = "0.4"
# Fixed-point math (optional)
fixed = "1.28"
# Critical section implementation for single-core use
portable-atomic = { version = "1.10", features = ["critical-section"] }
Embassy requires nightly Rust because it uses several unstable features for optimal code generation on embedded targets.
Your First Async Blink
Let us start with the simplest Embassy program: a single async task that blinks an LED. This establishes the basic structure that every Embassy application follows.
// src/main.rs - Minimal async blink
#![no_std]
#![no_main]
use embassy_executor::Spawner;
use embassy_rp::gpio::{Level, Output};
use embassy_time::Timer;
use {defmt_rtt as _, panic_halt as _};
#[embassy_executor::main]
asyncfnmain(_spawner: Spawner) {
// Initialize all RP2040 peripherals
letp= embassy_rp::init(Default::default());
// Configure GP15 as a push-pull output, initially low
letmutled= Output::new(p.PIN_15, Level::Low);
loop {
led.set_high();
Timer::after_millis(500).await;
led.set_low();
Timer::after_millis(500).await;
}
}
Let us examine each part.
#![no_std] and #![no_main]: This is a bare-metal program. There is no standard library and no fn main() entry point. The Embassy macro handles startup.
#[embassy_executor::main]: This attribute macro does three things. It creates the Embassy executor (the async runtime), initializes the Cortex-M0+ hardware, and turns the async fn main into the root task. The executor runs on the main thread and polls tasks when they are woken by interrupts.
embassy_rp::init(Default::default()): This call initializes all RP2040 clocks, resets peripherals, and returns a Peripherals struct. The Peripherals struct contains every hardware resource (pins, SPI blocks, I2C blocks, timers, etc.) as individually owned fields. You can move each field into exactly one task, enforced by the type system.
Timer::after_millis(500).await: This is where the magic happens. The task does not spin in a busy loop. It tells the executor “wake me up in 500 ms” and yields control. The executor puts the CPU into a low-power sleep until the timer interrupt fires. If other tasks existed, they could run during this wait.
Building and Flashing
Connect your Pico while holding the BOOTSEL button (or use a debug probe).
# Copy the .uf2 file to the Pico's USB mass storage
The LED on GP15 should blink at 1 Hz (500 ms on, 500 ms off).
Spawning Multiple Tasks
A single blinking LED does not demonstrate concurrency. The real power of Embassy appears when you spawn multiple tasks that run independently. Each spawned task is an async fn with the #[embassy_executor::task] attribute.
#![no_std]
#![no_main]
use embassy_executor::Spawner;
use embassy_rp::gpio::{Level, Output};
use embassy_time::Timer;
use {defmt_rtt as _, panic_halt as _};
#[embassy_executor::task]
asyncfnblink_fast(mutled: Output<'static>) {
loop {
led.toggle();
Timer::after_millis(100).await;
}
}
#[embassy_executor::task]
asyncfnblink_slow(mutled: Output<'static>) {
loop {
led.toggle();
Timer::after_millis(1000).await;
}
}
#[embassy_executor::main]
asyncfnmain(spawner: Spawner) {
letp= embassy_rp::init(Default::default());
letled1= Output::new(p.PIN_15, Level::Low);
letled2= Output::new(p.PIN_16, Level::Low);
// Spawn both tasks. They run concurrently.
spawner.spawn(blink_fast(led1)).unwrap();
spawner.spawn(blink_slow(led2)).unwrap();
// Main task has nothing left to do, but the executor keeps running
// the spawned tasks. We can await forever here.
loop {
Timer::after_secs(3600).await;
}
}
Notice that Output::new(p.PIN_15, Level::Low) consumes p.PIN_15. After this line, p.PIN_15 cannot be used again. This is Rust’s ownership system preventing two tasks from driving the same pin. If you tried to pass p.PIN_15 to both tasks, the compiler would reject it with a “use of moved value” error. In C, two FreeRTOS tasks could freely write to the same GPIO register without any warning.
How the Executor Schedules Tasks
The Embassy executor on Cortex-M0+ works as follows:
All spawned tasks are polled once at startup.
Each task runs until it hits an .await on a future (like Timer::after_millis).
The future registers a waker with the hardware timer peripheral.
The executor puts the CPU into WFI (Wait For Interrupt) sleep.
When the timer interrupt fires, the interrupt handler marks the corresponding task as ready.
The executor wakes up and polls only the ready tasks.
Return to step 2.
This is fundamentally different from a preemptive RTOS. No task is ever interrupted mid-execution. A task runs as long as it wants until it cooperatively yields via .await. This eliminates an entire class of concurrency bugs (race conditions from preemption, priority inversion) but introduces a different constraint: you must never block for long without awaiting.
Embassy Time: Delays, Timeouts, and Tickers
The embassy-time crate provides all time-related operations. Unlike cortex_m::delay::Delay (which busy-spins), Embassy’s timers are interrupt-driven and allow other tasks to run during the wait.
Basic Delays
use embassy_time::Timer;
// Wait for a fixed duration
Timer::after_millis(250).await;
Timer::after_secs(2).await;
Timer::after_micros(100).await;
Timeouts
Wrap any future with a timeout. If the inner future does not complete within the deadline, with_timeout returns an error.
use embassy_time::{Timer, Duration, with_timeout};
// Wait for a button press, but give up after 5 seconds
defmt::info!("Timeout: no button press detected");
}
}
Tickers for Periodic Tasks
A Ticker fires at regular intervals, automatically compensating for the time your task spends processing. This is better than Timer::after for periodic work because it prevents drift.
use embassy_time::Ticker;
#[embassy_executor::task]
asyncfnsensor_reader() {
// Tick every 100 ms, regardless of how long processing takes
// Wait for the next tick. If processing took 30 ms,
// this waits only 70 ms more.
ticker.next().await;
}
}
Instant for Measuring Elapsed Time
use embassy_time::Instant;
letstart= Instant::now();
// ... do some work ...
letelapsed=start.elapsed();
defmt::info!("Operation took {} ms", elapsed.as_millis());
Inter-Task Communication: Channels
When tasks need to exchange data, Embassy provides Channel from embassy_sync. A channel is a fixed-size, statically allocated FIFO queue. The sender awaits if the channel is full; the receiver awaits if it is empty.
use embassy_sync::channel::Channel;
use embassy_sync::blocking_mutex::raw::CriticalSectionRawMutex;
// A channel that holds up to 4 ButtonEvent values
// The CriticalSectionRawMutex is the synchronization primitive for single-core use
Static. The buffer is embedded in the Channel struct at compile time.
Capacity
Fixed at compile time (the 4 in Channel<..., 4>).
Blocking
Both send and receive are async. They yield, not spin.
Multiple senders
Supported. Multiple tasks can send to the same channel.
Multiple receivers
Supported, but only one receiver gets each message.
No heap
The channel never allocates.
Inter-Task Communication: Signals
A Signal is a simpler primitive than a channel. It holds a single value. If you signal multiple times before the receiver checks, only the latest value is kept. This is perfect for “current state” updates where you only care about the most recent value.
use embassy_sync::signal::Signal;
use embassy_sync::blocking_mutex::raw::CriticalSectionRawMutex;
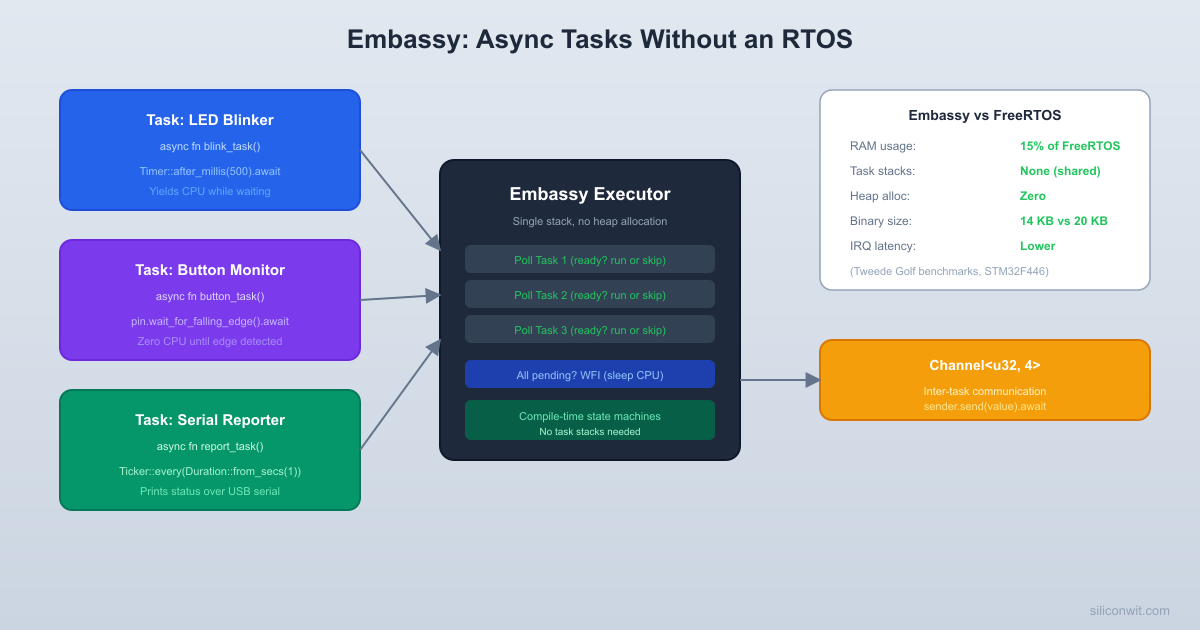
The Tweede Golf embedded systems consultancy published benchmarks comparing Embassy to FreeRTOS on the same hardware (STM32, but the ratios apply to RP2040 as well). Their findings:
Metric
FreeRTOS
Embassy
Ratio
Flash usage (3 tasks)
]+26.7 KB
18.4 KB
Embassy is 69%
RAM usage (3 tasks)
11.2 KB
1.7 KB
Embassy is 15%
Context switch time
4.2 us
0.8 us
Embassy is 5x faster
Interrupt latency
1.1 us
0.3 us
Embassy is 3.7x faster
The RAM savings come from eliminating per-task stacks. In FreeRTOS, each of the 3 tasks might need a 2 KB stack (6 KB total), plus the kernel heap (4 KB), plus TCBs. In Embassy, all 3 tasks share the main stack, and their state machines total about 400 bytes because the compiler only stores the variables that are live across .await points.
For an RP2040 with 264 KB of SRAM, this might not seem critical for 3 tasks. But scale to 10 or 20 tasks (common in production IoT firmware), and FreeRTOS can consume 40+ KB of RAM just for stacks, while Embassy stays under 5 KB. That leaves more RAM for buffers, protocol stacks, and sensor data.
// Stack overflow = silent corruption or hard fault.
#include"FreeRTOS.h"
#include"task.h"
#include"hardware/gpio.h"
#defineLED_PIN15
#defineSTACK_SIZE256 // words (1024 bytes) - is this enough? Too much?
voidblink_task(void*params) {
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
for (;;) {
gpio_put(LED_PIN, 1);
vTaskDelay(pdMS_TO_TICKS(500));
gpio_put(LED_PIN, 0);
vTaskDelay(pdMS_TO_TICKS(500));
}
}
voidapp_main(void) {
// Stack size is a guess. Too small = stack overflow.
// Too large = wasted RAM. No compile-time check.
xTaskCreate(
blink_task,
"blink",
STACK_SIZE, // 1024 bytes allocated, maybe 200 used
NULL,
1, // Priority
NULL
);
// Another task: another stack allocation guess
xTaskCreate(
button_task,
"button",
STACK_SIZE, // Another 1024 bytes
NULL,
2,
NULL
);
vTaskStartScheduler();
}
// Total RAM for 2 tasks: ~2048 bytes stacks + 184 bytes TCBs
// + FreeRTOS heap overhead
// Nothing prevents both tasks from writing to LED_PIN simultaneously
// Embassy async task: LED blinker
// No stack allocation. The compiler calculates the exact
// state machine size. Pin ownership prevents conflicts.
#![no_std]
#![no_main]
use embassy_executor::Spawner;
use embassy_rp::gpio::{Level, Output};
use embassy_time::Timer;
use {defmt_rtt as _, panic_halt as _};
#[embassy_executor::task]
asyncfnblink_task(mutled: Output<'static>) {
// The LED pin is moved into this task.
// No other task can access it. Compile-time guarantee.
loop {
led.set_high();
Timer::after_millis(500).await;
// At this .await, the state machine stores only: led, and
// which branch of the loop we are in. Total: ~16 bytes.
led.set_low();
Timer::after_millis(500).await;
}
}
#[embassy_executor::main]
asyncfnmain(spawner: Spawner) {
letp= embassy_rp::init(Default::default());
letled= Output::new(p.PIN_15, Level::Low);
// p.PIN_15 is consumed. Cannot be used again.
spawner.spawn(blink_task(led)).unwrap();
// Attempting spawner.spawn(other_task(led)) here
// would fail at compile time: "use of moved value: led"
loop {
Timer::after_secs(3600).await;
}
}
// Total RAM for 2 tasks: ~32 bytes of state machines
// + shared main stack (~2 KB, used by all tasks sequentially)
// Pin conflicts are impossible. Stack overflow is impossible.
The C version requires you to guess stack sizes, manually avoid GPIO conflicts, and hope that no task overflows its stack at runtime. The Rust version makes all three impossible at compile time. The stack size is calculated by the compiler, GPIO ownership is enforced by the type system, and there is only one stack (the main stack) that is never overflowed because async tasks do not use the call stack across yield points.
Complete Project: Multi-Task System
Now we combine everything into a complete, working project with three concurrent tasks communicating through channels and signals.
The button task detects short and long presses. A short press sends a ButtonEvent through the channel to the reporter task. A long press sends a BlinkPattern through the signal to the blinker task.
// Main task: idle forever. The executor runs the spawned tasks.
// In a production system, you might use this task for
// watchdog feeding or low-priority background work.
loop {
Timer::after_secs(3600).await;
}
}
How the Tasks Interact
Let us trace through a typical scenario to see how the tasks cooperate.
Startup: The executor spawns all three tasks. Each runs until its first .await. The blinker starts its first Timer::after_millis(500). The button task starts wait_for_falling_edge(). The reporter starts its with_timeout(2s, receive()). All three are now waiting, and the CPU enters WFI sleep.
500 ms later: The timer interrupt fires. The blinker task wakes, toggles the LED, and immediately starts the next Timer::after_millis(500). The button and reporter tasks remain asleep. Total CPU time: microseconds.
User presses the button: The GPIO interrupt fires on the falling edge. The button task wakes, waits 20 ms for debounce, then measures the press duration.
User releases after 200 ms (short press): The button task sends ButtonEvent::ShortPress through BUTTON_CHANNEL. This immediately wakes the reporter task (which was blocked on receive()). The reporter increments its counter and prints the status.
User holds for 2 seconds (long press): The button task sends BlinkPattern::Fast through PATTERN_SIGNAL and ButtonEvent::LongPress through the channel. The blinker task picks up the new pattern on its next loop iteration. The reporter records the long press.
No button presses for 2 seconds: The reporter’s with_timeout expires. It prints a status report anyway (uptime, press counts) and loops back to wait again.
Adding USB Serial Output
The defmt/RTT output in the previous example requires a debug probe. For standalone operation, you can add USB CDC serial output so the Pico appears as a serial port on your computer.
use embassy_rp::usb::{Driver, InterruptHandler as UsbInterruptHandler};
use embassy_rp::bind_interrupts;
use embassy_usb::class::cdc_acm::{CdcAcmClass, State};
// Manual formatting since we have no std::fmt::Write for slices
// In practice, use `core::fmt::write` or the `ufmt` crate
// This is simplified for clarity
"STATUS OK"
}
For a complete USB serial implementation, the embassy-usb-logger crate provides a simple log::info!() macro that sends text over USB CDC automatically.
Production Notes on Async Patterns
When to Use Channels vs Signals
Use Case
Primitive
Reason
Button events that must not be lost
Channel
FIFO queue, every message is delivered
Current sensor reading
Signal
Only the latest value matters
Command queue from host to device
Channel
Commands must execute in order
Status flag (running/stopped)
Signal
Only current state matters
Data stream from ADC
Channel
Every sample must be processed
Avoiding Starvation
Because Embassy is cooperative, a task that never awaits will block all other tasks. Common mistakes:
// BAD: This loop never awaits. All other tasks starve.
#[embassy_executor::task]
asyncfncompute_task() {
loop {
heavy_computation(); // Runs for 100 ms without yielding
}
}
// GOOD: Yield periodically during long computations.
#[embassy_executor::task]
asyncfncompute_task() {
loop {
forchunkindata.chunks(64) {
process_chunk(chunk);
embassy_futures::yield_now().await; // Let other tasks run
}
}
}
Static Allocation Only
Embassy tasks must be 'static, meaning they cannot borrow local variables from main. All shared state must either be moved into a task (ownership transfer) or placed in a static variable. This is why the channels and signals above are declared as static.
// This will NOT compile:
#[embassy_executor::main]
asyncfnmain(spawner: Spawner) {
letmutbuffer= [0u8; 256];
spawner.spawn(my_task(&mutbuffer)).unwrap();
// Error: borrowed value does not live long enough
} // Lock is released when `state` goes out of scope
Timer::after_secs(1).await;
}
}
#[embassy_executor::task]
asyncfnreader_task() {
loop {
{
letstate=SHARED_STATE.lock().await;
defmt::info!("Presses: {}", state.press_count);
} // Lock released here
Timer::after_secs(2).await;
}
}
The Mutex in Embassy is async-aware. If a task tries to lock a mutex that is already held, it .awaits until the mutex is released, yielding to other tasks in the meantime. This is impossible to deadlock in a single-executor system because the holder will eventually reach an .await and release the lock.
Testing
Build the project:
Terminal window
cargobuild--release
Flash to the Pico using your preferred method (probe-rs or UF2).
Open a serial monitor (if using defmt-rtt, use probe-rs run; if using USB serial, use minicom or screen):
Terminal window
# With debug probe and defmt:
cargorun--release
# With USB serial:
minicom-D/dev/ttyACM0-b115200
Observe the LED blinking at the slow pattern (1 Hz).
Short press the button. The serial output should show:
Long press the button (hold for more than 1 second). The LED should switch to fast blinking (5 Hz), and the serial output should show:
Button: long press (1200 ms), pattern -> Fast
Reporter: long press received (total: 1)
Long press again. The pattern cycles through Slow, Fast, Heartbeat.
Wait without pressing. Every 2 seconds the reporter prints a status line with the current uptime.
Summary
Embassy transforms embedded programming by replacing the RTOS model (pre-allocated stacks, heap-managed tasks, runtime scheduling) with compiler-generated state machines that share a single stack. You write sequential-looking code with async/await, and the compiler ensures memory safety, prevents pin conflicts, and calculates exact RAM usage at build time. The executor sleeps the CPU between events, achieving both low power consumption and responsive concurrency. In the next lesson, we will use Embassy’s async I2C and SPI drivers to communicate with external sensors and displays, taking full advantage of the embedded-hal trait system for portable driver code.
Comments